shape Package¶
The shape package provides a collection of simple geometric shapes,
methods for building arbitrary geometric shapes from functions/points, and
methods to load geometry from files.
The following sections describe the different shapes currently include
in the toolbox.
Additional shapes can be created using the shape builders or by
sub-classing Shape to define a new shape class.
The basic shapes currently included in the toolbox focus on simple geometries and shapes of particles commonly trapped in optical tweezers. A summary of the different shapes and methods currently included is shown in Fig. 9. The package is split into four main sections: Simple geometric shapes, Shape builders, File loaders and Collections. The shape builders can be used to create arbitrary shapes from sets of vertices or parametric functions. In addition to the simple geometric shapes, some of the shape builder classes define static methods for building other commonly used shapes. More complex shapes can be created in external CAD programs (such as Blender) and loaded using the file loaders. The shape sets can be used to combine shapes or invert geometries.
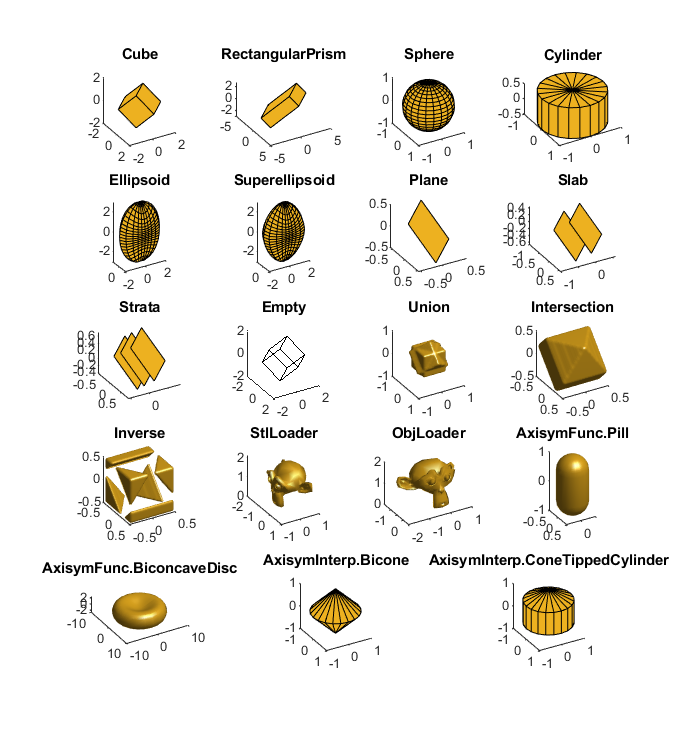
Fig. 9 Graphical display of the different shape creation methods currently included in the toolbox. Plot titles correspond to shapes classes and static methods of shapes classes. Most methods display the default geometry generated using surf. File loaders show different views of the suzane mesh; Empty is reprsented by a face-less cube; and collections show combinations of cubes.¶
The design of the shape classes is motivated by the scattering methods. Most scattering methods involve surface integrals, volume integrals or calculation of surface normals. These classes describe geometries with these quantities in mind. The complexity of various scattering simulations can often be reduced when the particle is star shaped, mirror symmetric or rotational symmetric. Consequently, all shapes have methods for querying these properties, although they may not be implemented for certain shapes (check documentation).
Contents
Base class¶
The base class for all OTT shapes is the Shape class.
This class defines the interface expected by most of the scattering
methods.
You will probably only need to use this class directly when
implementing complex custom shapes.
For simpler custom shapes, see the Shape builders.
Additional classes describing additional conditions on shape geometry
or helpers for defining commonly used methods can be found in the
ott.shapes.mixin package.
Shape¶
- class ott.shape.Shape(varargin)¶
Shape abstract class for optical tweezers toolbox shapes. Inherits from
ott.utils.RotationPositionPropand matlab.mixin.Hetrogeneous.Properties disregard the rotation/position properties and describe the object in the local coordinates.
- Properties
position – Location of shape
[x, y, z]rotation – Orientation of the particle (3x3 rotation matrix)
- Abstract properties
maxRadius – Maximum particle radius
volume – Particle volume
boundingBox – Cartesian coordinate bounding box
starShaped – True if the shape is star-shaped
xySymmetry – True if shape is xy-mirror symmetric
zRotSymmetry – z-axis rotational symmetry of particle
- Methods
surf – Generate surface visualisation
scale – Scale the geometry (uses scaleInternal)
voxels – Generate array of voxels or voxel visualisation
insideRtp – Determine if Spherical point is inside shape
insideXyz – Determine if Cartesian point is inside shape
normalsRtp – Calculate normals at surface location
normalsXyz – Calculate normals at surface location
writeWavefrontObj – write shape to Wavefront OBJ file
intersect – Calculate intersection between vectors and surface
starRadii – Calculate radii of star shaped particle
intersectAll – Calculate intersection between vectors and surface
intersectBoundingBox – Calculate intersection with bounding box
getBoundingBox – Get the bounding box with transformations applied
getBoundingBoxShape – Get a shape representing the bounding box
rotate* – Functions for rotating the entity
translate* – Functions for translating the entity
operator/ – Scale the object (uses scale)
operator* – Scale the object (uses scale)
operator| – Union operator: creates a new set
operator& – Intersection operator: creates a new set
operator~ – Inverse operator: creates a new
Inverse.
- Abstract methods
scaleInternal – Scale the geometry (called by times/rdivide)
surfInternal – Generate surface visualisation
surfPoints – Calculate points for surface integration
intersectInternal – Method called by intersect
intersectAllInternal – Method called by intersectAll
insideRtpInternal – Determine if Spherical point is inside shape
insideXyzInternal – Determine if Cartesian point is inside shape
normalsRtpInternal – Calculate normals at surface location
normalsXyzInternal – Calculate normals at surface location
- Supported casts
TriangularMesh – Requires cast for PatchMesh
- Shape(varargin)¶
Construct a new shape instance.
This class cannot be instanced directly, use one of the other shape descriptions to create a new shape.
- Usage
shape = shape@ott.shape.Shape(…)
- Optional named arguments
position (3 numeric) – Position of the shape. Default:
[0;0;0].rotation (3x3 numeric) – Orientation of the shape. Default:
eye(3).
- and(a, b)¶
Create a intersection of two shapes
- Usage
shape = shape1 & shape2
- getBoundingBox(shape, varargin)¶
Get bounding box after applying transformations
- Usage
bb = shape.getBoundingBox(…)
- Optional named arguments
origin (enum) – Coordinate origin. ‘local’ or ‘global’.
- insideRtp(shape, varargin)¶
Determine if point is inside the shape (Spherical coordinates)
- Usage
b = shape.insideRtp(rtp, …)
- Parameters
rtp (3xN numeric) – Spherical coordinates.
- Optional arguments
origin (enum) – Coordinate system origin. Either ‘global’ or ‘local’ for world coordinates or shape coordinates.
- insideXyz(shape, varargin)¶
Determine if point is inside the shape (Cartesian coordinates)
- Usage
b = shape.insideXyz(xyz, …)
- Parameters
xyz (3xN numeric) – Cartesian coordinates.
- Optional arguments
origin (enum) – Coordinate system origin. Either ‘global’ or ‘local’ for world coordinates or shape coordinates.
- intersect(shape, x0, x1, varargin)¶
Calculate intersection locations and normals.
Any rays that don’t intersect shape result in nans.
- Usage
[locs, norms, dist] = shape.intersectAll(shape, vecs, …)
- Parameters
vecs (3xM Vector) – vectors to intersect. Must be castable to a ott.utils.Vector object.
- Returns
locs (3xN numeric) – intersections with N locations
norms (3xN numeric) – surface normals at N intersections
- Optional named arguments
origin (enum) – Coordinate origin. ‘local’ or ‘global’.
Additional arguments passed to intersectInternal.
- isosurface(shape, varargin)¶
Generate an isosurfrace for the shape from the voxel data
This method is more intensive than the surf method and often less accurate but provides a useful alternative when the shape doesn’t directly support a surf method.
- Usage
FV = shape.isosurface(…)
- Optional named parameters
samples (3 numeric) – Number of samples per Cartesian axes.
visualise (logical) – Show the visualisation. Default:
nargout == 0origin (enum) – Coordinate system origin. Either ‘global’ or ‘local’ for world coordinates or shape coordinates. Default:
'global'.axis (handle) – Axes hanlde to place plot in. Default:
[], uses gca() when available.
- normalsRtp(shape, varargin)¶
Calculate normals at the specified surface locations
- Usage
nxyz = shape.normalsRtp(rtp, …) Result is in Cartesian coordinates.
- Parameters
rtp (3xN numeric) – Spherical coordinates.
- Optional arguments
origin (enum) – Coordinate system origin. Either ‘global’ or ‘local’ for world coordinates or shape coordinates.
- normalsXyz(shape, varargin)¶
Calculate normals at the specified surface locations
- Usage
nxyz = shape.normalsXyz(xyz, …) Result is in Cartesian coordinates.
- Parameters
xyz (3xN numeric) – Cartesian coordinates.
- Optional arguments
origin (enum) – Coordinate system origin. Either ‘global’ or ‘local’ for world coordinates or shape coordinates.
- not(shape)¶
Take the inverse of the shape
- Usage
shape = ~shape
- or(a, b)¶
Create a union of two shapes
- Usage
shape = shape1 | shape2
- surf(shape, varargin)¶
Generate a visualisation of the shape
- Usage
shape.surf(…) Display visualisation of shape(s).
S = shape.surf(…) Returns a array of handles to the generated patches or when no visualisation is enabled, creates a cell array of structures that can be passed to patch.
- Optional named parameters
axes (handle) – axis to place surface in (default: gca)
surfOptions (cell) – options to be passed to patch (default: {})
showNormals (logical) – Show surface normals (default: false)
origin (enum) – Coordinate origin for drawing. Can be ‘global’ or ‘local’ Default: ‘global’.
visualise (logical) – Show the visualisation. Default:
truenormalScale (numeric) – Scale for normal vectors. Default:
0.1.
Additional parameters passed to
surfInternal().
- voxels(shape, varargin)¶
Generate an array of xyz coordinates for voxels inside the shape
- Usage
voxels(spacing) shows a visualisation of the shape with circles placed at locations on a Cartesian grid.
xyz = voxels(spacing) returns the voxel locations.
- Optional named arguments
‘plotoptions’ Options to pass to the plot3 function
‘visualise’ Show the visualisation (default: nargout == 0)
origin (enum) – Coordinate system origin. Either ‘global’ or ‘local’ for world coordinates or shape coordinates. Default:
'global'.axes (handle) – Axes hanlde to place plot in. Default:
[], uses gca() when available.
- writeWavefrontObj(shape, filename)¶
Write representation of shape to Wavefront OBJ file
Convert the shape to a TriangularMesh and write it to a file.
- Usage
shape.writeWavefrontObj(filename)
- Parameters
filename (char | string) – Filename for file to write to.
Simple geometric shapes¶
Cube¶
- class ott.shape.Cube(varargin)¶
Simple geometric cube. Inherits from
Shape.- Properties
width – Width of the cube
Additional properties inherited from base.
- Cube(varargin)¶
Construct a cube.
- Usage
shape = Cube(width, …) Parameters can be passed as named arguments.
Additional parameters are passed to base.
RectangularPrism¶
- class ott.shape.RectangularPrism(varargin)¶
Simple geometric rectangular prism. Inherits from
Shape.- Properties
widths – Widths of each side [x; y; z]
- Supported casts
ott.shape.Cube – Only if widths all match
Additional properties inherited from base.
- RectangularPrism(varargin)¶
Construct a rectangular base prism
- Usage
shape = RectangularPrism(widths, …) Parameters can be passed as named arguments.
Additional parameters are passed to base.
Sphere¶
Cylinder¶
Ellipsoid¶
- class ott.shape.Ellipsoid(varargin)¶
Ellipsoid shape
- Properties:
radii – Radii along Cartesian axes [X; Y; Z]
- Supported casts
ott.shape.Spehre – Only works when ellipsoid is a sphere
ott.shape.AxisymInterp – Only works when zRotSymmetry == 0
ott.shape.PatchMesh
- Ellipsoid(varargin)¶
Construct a new ellipsoid
- Usage
shape = Ellipsoid(radii, …) Parameters can be passed as named arguments.
Additional parameters passed to base.
Superellipsoid¶
- class ott.shape.Superellipsoid(varargin)¶
Superellipsoid shape
In Cartesian coordinates, a superellipsoid is defined by
\[( |x/a|^{2/e} + |y/b|^{2/e} )^{e/n} + |z/c|^{2/n} = 1\]where \(a,b,c\) are the radii along Cartesian directions, and \(e,n\) are the east-west and north-south smoothness parameters. For more details see https://en.wikipedia.org/wiki/Superellipsoid
- Properties
radii – Radii along Cartesian axes [X; Y; Z]
ew – East-West smoothness (ew = 1 for ellipsoid)
ns – North-South smoothness (sw = 1 for ellipsoid)
- Superellipsoid(varargin)¶
Construct a new superellipsoid
- Usage
shape = Superellipsoid(radii, ew, ns, …)
- Parameters
radii (3 numeric) – Radii along Cartesian axes.
ew (numeric) – East-west smoothness (xy-plane) Default: 0.8
ns (numeric) – North-south smoothness (z-axis) Default: 1.2
Plane¶
- class ott.shape.Plane(varargin)¶
Shape describing a plane with infinite extent Inherits from
ott.shape.Shape.- Dependent properties
normal – Vector representing surface normal
offset – Offset of surface from coordinate origin
- Supported casts
TriangularMesh – (Inherited) Uses PatchMesh
PatchMesh
Strata
Slab
- Plane(varargin)¶
Construct a new infinite plane
- Usage
shape = Plane(normal, …)
- Optional named arguments
normal (3xN numeric) – Normals to planes, pointing outside. Default:
[]. Overwrites any values set with rotation.offset (1xN numeric) – Offset of the plane from the position. Default:
[]. Overwrites any values set with position.position (3xN numeric) – Position of the plane. Default:
[0;0;0].rotation (3x3N numeric) – Plane orientations. Default:
eye(3).
Slab¶
- class ott.shape.Slab(varargin)¶
Shape describing a slab with infinite extent in two directions Inherits from
ott.shape.Shape.- Properties
normal – Vector representing surface normal
depth – Depth of the slab
- Supported casts
TriangularMesh – (Inherited) Uses PatchMesh
PatchMesh – Uses Strata
Strata
- Slab(varargin)¶
Construct a new infinite slab
- Usage
shape = Slab(depth, normal, …)
- Optional named arguments
depth (N numeric) – Depth of surface. Default: 0.5.
normal (3xN numeric) – Normals to planes. Default:
[]. Overwrites any values set with rotation.position (3xN numeric) – Position of the plane. Default:
[0;0;0].rotation (3x3N numeric) – Plane orientations. Default:
eye(3).
Strata¶
- class ott.shape.Strata(varargin)¶
Shape describing a series of stratified interfaces. Inherits from
Plane.This shape describes a series of layered planes. When the number of layers is equal to 2, this object can be converted to a Slab. All points above the first layer are considered to be inside the shape.
- Properties
normal – Vector representing surface normal
offset – Offset of surface from coordinate origin
depths – Depth of each layer (must be positive)
- Strata(varargin)¶
Construct a new infinite slab
- Usage
shape = Slab(depths, normal, …)
- Optional named parameters
depths (numeric) – Depth of each layer. Default:
[0.2, 0.5].normal (3x1 numeric) – Surface normal. Default:
[]. Overwrite any value set withrotation.offset (numeric) – Offset of the plane from the position. Default:
[]. Overwrites any values set withposition.position (3x1 numeric) – Position of the plane. Default:
[0;0;0].rotation (3x3 numeric) – Plane orientation. Default:
eye(3).
Empty¶
- class ott.shape.Empty(varargin)¶
An empty shape (with no geometry)
The element still inherits from Shape and has position and rotation properties. The object can be visualised with surf, which draws a cube with transparent faces.
This is the default element in an empty Shape array.
- Properties
volume – Shape has no volume
maxRadius – Shape max radius is zero
- Methods
surf – Draws a hollow cube
surfPoints – Returns an empty array
- Empty(varargin)¶
Construct a new empty shape
- Usage
shape = Empty(…)
- Optional parameters
position (3xN numeric) – Position of the shape. Default:
[0;0;0].rotation (3x3N numeric) – Orientation of the shape. Default:
eye(3).
Shape builders¶
TriangularMesh¶
- class ott.shape.TriangularMesh(verts, faces, varargin)¶
Describes a mesh formed by triangular patches.
This class is similar to
PatchMeshexcept the patches must be triangles (described by three vertices).- Properties
verts – 3xN matrix of vertex locations
faces – 3xN matrix of vertex indices describing faces
norms – 3xN matrix of face normal vectors
zRotSymmetry – (Can be set) rotational symmetry of shape
xySymmetry – (Can be set) mirror symmetry of shape
starShaped – (Can be set) if the particle is star shaped
- Methods
subdivide – Add an extra vertex to the centre of each face
Faces vertices should be ordered so normals face outwards for volume and inside functions to work correctly.
- TriangularMesh(verts, faces, varargin)¶
Construct a new triangular mesh representation
- Usage
shape = TriangularMesh(verts, faces)
- Parameters
verts (3xN numeric) – Vertex locations
faces (3xN numeric) – Indices describing faces
Faces vertices should be ordered so normals face outwards for volume and inside functions to work correctly.
Any faces formed by duplicate vertices are removed.
PatchMesh¶
- class ott.shape.PatchMesh(verts, faces, varargin)¶
A surface resembling Matlab polygon patches.
This surface casts to
TriangularMeshfor most operations.- Properties
verts – (3xN numeric) Array of vertices for forming faces
faces – (mxN numeric) Vertex indices for polygons
- PatchMesh(verts, faces, varargin)¶
Construct a new Patch mesh representation
- Usage
shape = PatchMesh(verts, faces, …)
- Parameters
verts (3xN numeric) – Array of vertices for forming faces
faces (mxN numeric) – Vertex indices for polygons
AxisymInterp¶
- class ott.shape.AxisymInterp(varargin)¶
Rotationally symmetric shape described by discrete set of points.
Shape produced when converting this object to a patch uses linear interpolation between points and discrete rotational segments.
- Properties
points – Discrete points describing surface [rho; z]
- Methods
boundaryPoints – Calculate points for line integration
surfPoints – Calculate points for surface integration
- Supported casts
PatchMesh
- Static methods
Bicone – Create a bicone
ConeTippedCylinder – Create a cone-tipped cylinder
Volume is computed numerically, may change in future.
Additional properties/methods inherited from base.
- AxisymInterp(varargin)¶
Construct a new rotationally symmetry shape from discrete points
- Usage
shape = AxisymInterp(points, …)
- Parameters
points (2xN numeric) – Array of points in cylindrical coordinates describing shape geometry. [rho; z]
Additional parameters passed to base.
- static Bicone(varargin)¶
Construct a bicone
A Bicone is xy-mirror symmetric and has three vertices, two on the +(ve)/-(ve) axes and one in the mirror symmetric plane.
- Usage
shape = AxisymInterp.Bicone(height, radius, …)
- Parameters
height (numeric) – Total height of the shape (default: 2.0)
radius (numeric) – Radius of the cone (default: 1.0)
Additional parameters passed to class constructor.
- static ConeTippedCylinder(varargin)¶
Construct a cone-tipped cylinder
- Usage
shape = ConeTippedCylinder(height, radius, coneHeight, …)
- Parameters
height (numeric) – total height of the shape (default: 2.0)
radius (numeric) – radius of cylinder (default: 1.0)
coneHeight (numeric) – Height of the cone segment (default: 0.5)
Additional parameters passed to class constructor.
AxisymFunc¶
- class ott.shape.AxisymFunc(varargin)¶
Rotationally symmetry shape described by a function
- Properties
func – Function describing surface
type – Type of function (radial | angular | axial | axialSym)
range – Range of function parameter values (default: [-Inf, Inf])
- Methods
surf – Visualise the shape (via PatchMesh)
- Static methods
BiconcaveDisc – Create a biconcave disk shape
Pill – Create a pill tipped shaped cylinder
- Supported casts
AxisymInterp
PatchMesh – Via AxisymInterp
- AxisymFunc(varargin)¶
Construct a new rotationally symmetric shape from a function
- Usage
shape = AxisymFunc(func, type, …)
- Parameters
func (function_handle) – A function handle describing the shape surface. The function should take a single vectorised argument. The argument will depend on the type: radial: z, angular: theta, axial: r
type (enum) – Type of function. Can either be ‘angular’, ‘radial’, ‘axial’ or ‘axialSym’.
- Optional named arguments
range (2 numeric) – Range of function parameter values. Default:
[-Inf, Inf](radial),[-pi, pi](angular), and[0, Inf](axial/axialSym).
Additional parameters passed to base.
- static BiconcaveDisc(varargin)¶
Construct a biconcave disc shape
This shape can be used to model cells such as unstressed Red Blood Cells. It implements the function:
z(r) = D \sqrt{1 - \frac{4r^2}{D^2}} \left(a_0 + \frac{a_1 r^2}{D^2} + \frac{a_2 r^4}{D^4} \right)
where \(D\) is the particle diameter and \(a\) are shape coefficients.
- Usage
shape = AxisymFunc.BiconcaveDisc(radius, coefficients, …)
- Parameters
radius (numeric) – Radius of disc. Default:
7.82.coefficients (3 numeric) – Coefficients describing shape. Default:
[0.0518, 2.0026, -4.491].
Additional parameters are passed to shape constructor.
- static Pill(varargin)¶
Construct a pill-shaped particle
Constructs a cylindrical shaped rod with spherical end caps.
- Usage
shape = AxisymFunc.Pill(height, radius, capRadius, …)
- Parameters
height (numeric) – Total height of pill including end caps. Default:
2.0.radius (numeric) – Radius of rod segment. Default:
0.5.capRadius (numeric) – Radius of end cap. Default:
radius. If capRadius is greater than radius, adds a sharp edge at the intersection of the cap and the rod. If radius is less, adds a flat end-cap.
Additional parameters are passed to class constructor.
File loaders¶
For more complex shapes, it is often more convinent to work with a dedicated computer aided design (CAD) program such as Blender. The toolbox currently includes two types of commonly used CAD formats: STL and Wavefront OBJ.
StlLoader¶
- class ott.shape.StlLoader(filename, varargin)¶
Load a shape from a STL file. Inherits from
TriangularMesh.- Properties
filename – Name of the file this object loaded
Additional methods and properties inherited from base class.
This class uses a 3rd party STL file reader: https://au.mathworks.com/matlabcentral/fileexchange/22409-stl-file-reader See
tplicenses/stl_EricJohnson.txtfor information about licensing.See also StlLoader, ott.shape.TriangularMesh, ott.shape.WavefrontObj.
- StlLoader(filename, varargin)¶
Construct a new shape from a STL file
- Usage
shape = StlLoader(filename, …) Loads the face and vertex information contained in the file.
Only supports binary STL files.
This function uses 3rd party code, see
tplicenses/stl_EricJohnson.txtfor licensing information.
ObjLoader¶
- class ott.shape.ObjLoader(filename)¶
Load a shape from a Wavefront OBJ file. Inherits from
TriangularMesh.- Properties
filename – Filename for loaded OBJ file
The file format is described at https://en.wikipedia.org/wiki/Wavefront_.obj_file
- ObjLoader(filename)¶
Construct a new shape from a Wavefront OBJ file
Loads the face and vertex information contained in the file. Faces are converted to triangles.
- Usage
shape = ObjLoader(filename)
Collections¶
These classes can be used for combining or modifying existing geometry. For example, to combine two shapes so that all points inside either shape are considered inside the combined shape, use a union:
shape = shape1 | shape2;
Or, to create a shape from the intersection of two shapes, use:
shape = shape1 & shape2;
To invert the inside/outside of a shape, use the inverse:
shape = ~shape;
Set¶
- class ott.shape.Set(shapes, varargin)¶
Collection of shapes Inherits from
Shape.This is the base class for collections of shapes including
UnionandIntersection.- Properties
shapes – Shapes forming the set
volume – Calculated numerically
starShaped – Variable, default false
xySymmetry – Variable, default false
zRotSymmetry – Variable, default 1
- Set(shapes, varargin)¶
Construct a new shape set
This is the abstract constructor for shape sets. Use Union or Intersection for instances.
- Usage
shape = shape@ott.shape.Set(shapes, …)
Stores shapes and passes optional arguments to base.
Union¶
- class ott.shape.Union(varargin)¶
Represents union between two shapes (| operator). Inherits from
Set.- Properties
shapes – Shapes forming the set
maxRadius – Estimated from bounding box
volume – Calculated numerically
boundingBox – Surrounding all shapes
- Methods
operator| – (Overloaded) Allow daisy chains
- Union(varargin)¶
Construct a union shape set.
- Usage
shape = Union(shapes, …)
All parameters are passed to base class.
Intersection¶
- class ott.shape.Intersection(varargin)¶
Represents intersection between two shapes (& operator). Inherits from
Set.- Properties
shapes – Shapes forming the set
maxRadius – Estimated from bounding box
volume – Calculated numerically
boundingBox – Surrounding intersection
- Methods
operator& – (Overloaded) Allow daisy chains
- Intersection(varargin)¶
Construct a intersection shape set.
- Usage
shape = Intersection(shapes, …)
All parameters are passed to base class.
Inverse¶
- class ott.shape.Inverse(internal, varargin)¶
Inverts the geometry of a shape. Inherits from
Shape.- Properties
internal – Internal shape that is inversed
volume – If volume was finite, makes it infinite
maxRadius – If maxRadius was finite, makes it infinite
- Methods
operator~ – Smart inverse
- Inverse(internal, varargin)¶
Construct a new inverse shape
- Usage
shape = Inverse(internal, …)
Additional parameters passed to base.